|
【控制要求】
利用 PLC 實(shí)現(xiàn)點(diǎn)動(dòng)控制步進(jìn)電機(jī)的基礎(chǔ)過(guò)程�。
【程序編輯】
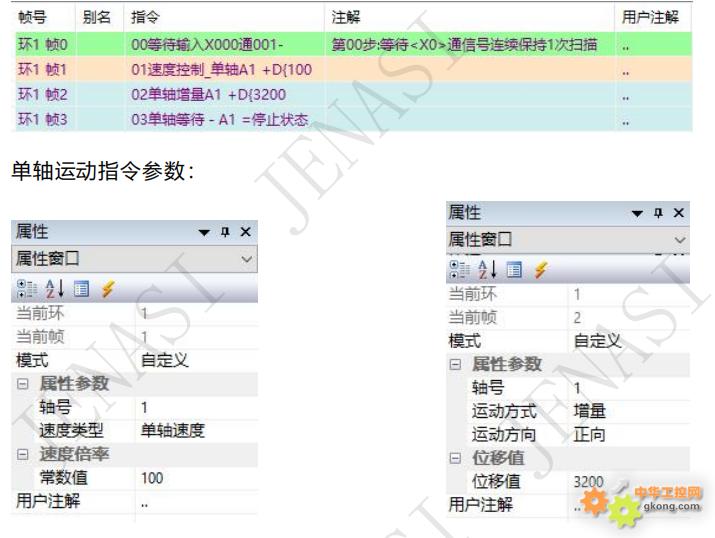
在環(huán) 0 中編輯程序:添加一個(gè)等待輸入 X0,為通狀態(tài)����。再添加一個(gè)
運(yùn)動(dòng)指令-單軸運(yùn)動(dòng)����,如下圖所示,設(shè)置 1 號(hào)軸運(yùn)動(dòng)指令參數(shù)�����,運(yùn)動(dòng)方式:
增量�,方向?yàn)檎较颍覀儗⑺俣缺仍O(shè)置為 100(1 號(hào)軸以參考速度 10%
正向運(yùn)動(dòng) 32000 個(gè)位移)�����,位移值為 3200����。
軸參數(shù):
我們可以看到 1 號(hào)軸的速度為 800,設(shè)定的速度比為 100����,則步進(jìn)
電機(jī)以 800 的速度動(dòng)作,運(yùn)行的位移值 3200���,正好運(yùn)行一周�。

掌握了控制步進(jìn)電機(jī)的基本過(guò)程,可以根據(jù)自己的需求來(lái)設(shè)定步進(jìn)
電機(jī)動(dòng)作的速度��。
|

