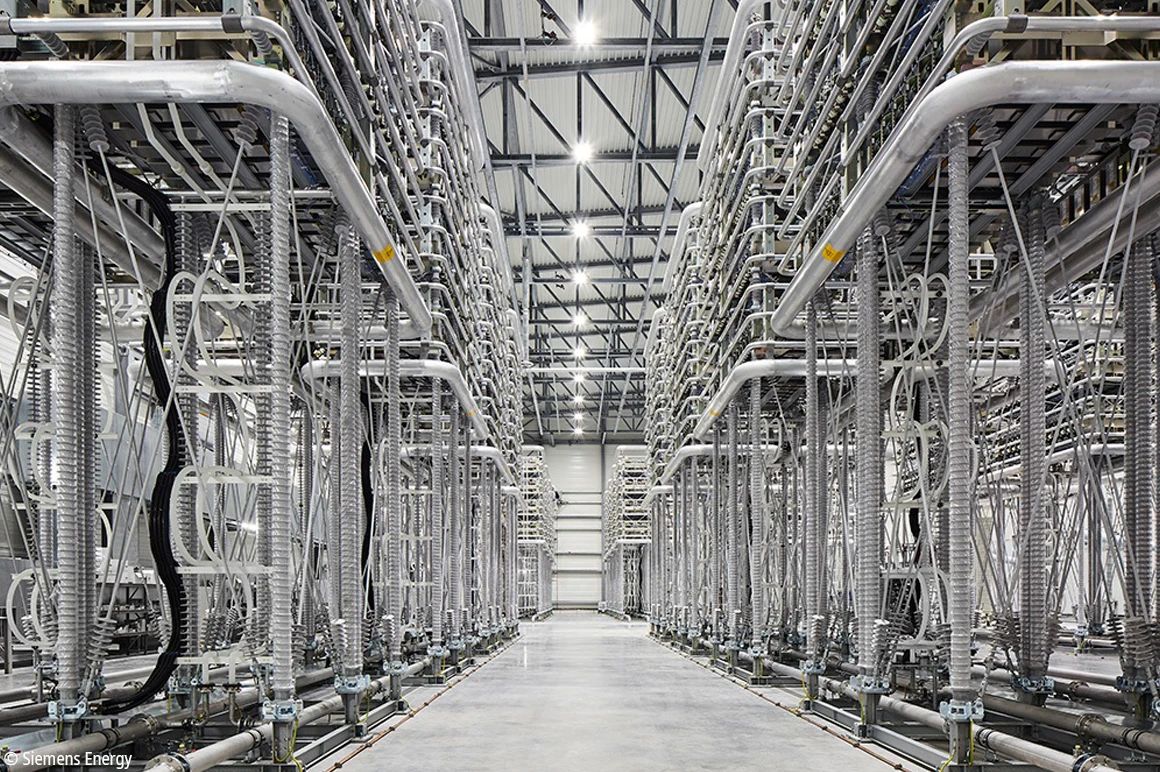
無論是將遠(yuǎn)海上的海上風(fēng)力發(fā)電機(jī)組的電力傳輸至陸上電網(wǎng)�;還是跨越德國南北,將北部風(fēng)力發(fā)電機(jī)組的綠色能源輸送到南部的工業(yè)重鎮(zhèn)����;亦或是將斯堪的納維亞半島水電站的電力遠(yuǎn)送中歐腹地,高壓直流輸電技術(shù)始終扮演著重要角色——用于實(shí)現(xiàn)大功率遠(yuǎn)距離輸電�����。西門子能源公司在其解決方案中采用了 MathWorks 的 MATLAB® 和 Simulink® 以及倍?����;?PC 的控制技術(shù)���。
自 19 世紀(jì) 90 年代�����,尼古拉·特斯拉(Nikola Tesla)和喬治·威斯汀豪斯(George Westinghouse)就美國電力供應(yīng)技術(shù)展開的“電流大戰(zhàn)”以來�����,交流電成為了電力傳輸領(lǐng)域中應(yīng)用最為廣泛的方式���。然而����,用于遠(yuǎn)距離傳輸交流電的電纜會產(chǎn)生電容效應(yīng)�,導(dǎo)致傳輸損耗,因此需要通過無功功率進(jìn)行補(bǔ)償�。然而,在直流輸電中��,這種無功功率需求可忽略不計��,即電流可以在顯著降低損耗的情況下進(jìn)行傳輸��。這就是為什么采用高壓直流電來進(jìn)行大功率輸電的原因����。
直流輸電的基本原理
簡而言之,這種直流輸電方式使用兩個帶公共直流母線的變流器��。每個變流器都能夠靈活地將電網(wǎng)中的交流電轉(zhuǎn)換成直流電傳輸?shù)街绷髂妇€中����,也能夠?qū)⒅绷髂妇€中的直流電轉(zhuǎn)換成交流電回饋到電網(wǎng)中�。這樣就可以在兩個電網(wǎng)之間以任意方向傳輸電能����。直流母線中使用的是特高壓直流輸電,系統(tǒng)因此得名為高壓直流(HVDC)輸電系統(tǒng)�。作用類似于閥門的晶體管被稱為絕緣柵雙極型晶體管(IGBT)���,用于實(shí)現(xiàn)電流的轉(zhuǎn)換����。晶體管可以控制電流的通斷�����,然后通過控制晶體管的通斷生成所需的電流曲線��。
然而�,高壓直流輸電系統(tǒng)的變流器與傳統(tǒng)變流器的尺寸設(shè)計是不同的。這是因?yàn)樗捎昧擞蓴?shù)百個 IGBT 組成的模塊化多電平換流器(MMC)�,并部署在 10 至 15 公頃的區(qū)域內(nèi)。直流母線使用 100 至 800 kV 電壓�,可在數(shù)百公里的距離內(nèi)傳輸 500 至 6400 MW 的電力���。
全新的大功率變流器控制解決方案
作為輸電系統(tǒng)和電網(wǎng)穩(wěn)定領(lǐng)域的杰出制造商,西門子能源今后將更加信賴倍?;?PC 的控制技術(shù)。嵌入式控制器�����、EtherCAT I/O 端子模塊以及 TwinCAT 自動化軟件����,結(jié)合基于模型的設(shè)計,更好地控制和保護(hù)大功率變流器��。這些變流器不僅構(gòu)成了高壓直流輸電系統(tǒng)的基石�,而且還可用于補(bǔ)償無功功率以及支撐和穩(wěn)定電網(wǎng)(柔性交流輸電系統(tǒng),F(xiàn)ACTS)的系統(tǒng)�。
為了確保電網(wǎng)這一重要部分的高可靠性,通常會使用冗余系統(tǒng)�����。硬件和軟件中的控制和保護(hù)系統(tǒng)始終處于熱備用模式���,以便在發(fā)生故障時能夠立即切換到冗余系統(tǒng)�。為了實(shí)現(xiàn)這一點(diǎn),根據(jù) IEC 62439-3 標(biāo)準(zhǔn)�����,采用 TwinCAT Parallel Redundancy Protocol (PRP) 技術(shù)�����,通過多個獨(dú)立的以太網(wǎng)網(wǎng)絡(luò)建立冗余通信���。通過這種方法��,嵌入式控制器不僅能夠利用 EtherCAT 自動化協(xié)議 (EAP) 實(shí)現(xiàn)彼此之間的高效通信,而且還能通過符合 IEC 61850 標(biāo)準(zhǔn)的 MMS 和 GOOSE 協(xié)議與斷路器等外部系統(tǒng)通信����。
快速響應(yīng)和安全運(yùn)行
使用 EtherCAT 和高性能嵌入式控制器,可以有效滿足更高等級的電流和電壓控制對快速響應(yīng)時間的要求�。由于 CX2043 嵌入式控制器搭載的是 AMD Ryzen™ 處理器,因此 TwinCAT 能夠以 250 µs 的周期時間和極小的抖動執(zhí)行控制任務(wù)���。每個變流器最多可使用 12 臺這樣的嵌入式控制器����,它們通過 EtherCAT 橋接端子模塊 EL6695 在冗余段中快速交換信號。
操作系統(tǒng)選用的是 TwinCAT/BSD��,以確保作為關(guān)鍵基礎(chǔ)設(shè)施核心組成部分的系統(tǒng)能夠?qū)崿F(xiàn)安全無憂的操作�����。它為 TwinCAT 3 Runtime 提供了一個高效�、穩(wěn)定的 Unix 平臺,同時也充分滿足了當(dāng)前及未來日益增長的安全需求�����。隨后�,TwinCAT 模塊在 TwinCAT 3 Runtime 中執(zhí)行。直接在 C/C++ 中開發(fā)的 TwinCAT 模塊用于基礎(chǔ)功能或特殊通信堆棧���。通過這些模塊����,可以將控制軟件從硬件細(xì)節(jié)或通過 EtherCAT 或 IEC 61850 等各種協(xié)議進(jìn)行的通信過程中抽離出來��。然后����,使用 MATLAB® 和 Simulink® 中基于模型的開發(fā)方法配置系統(tǒng)的特定功能和控制����,并通過代碼自動生成技術(shù)將其傳輸?shù)角度胧娇刂破鳌?/p>
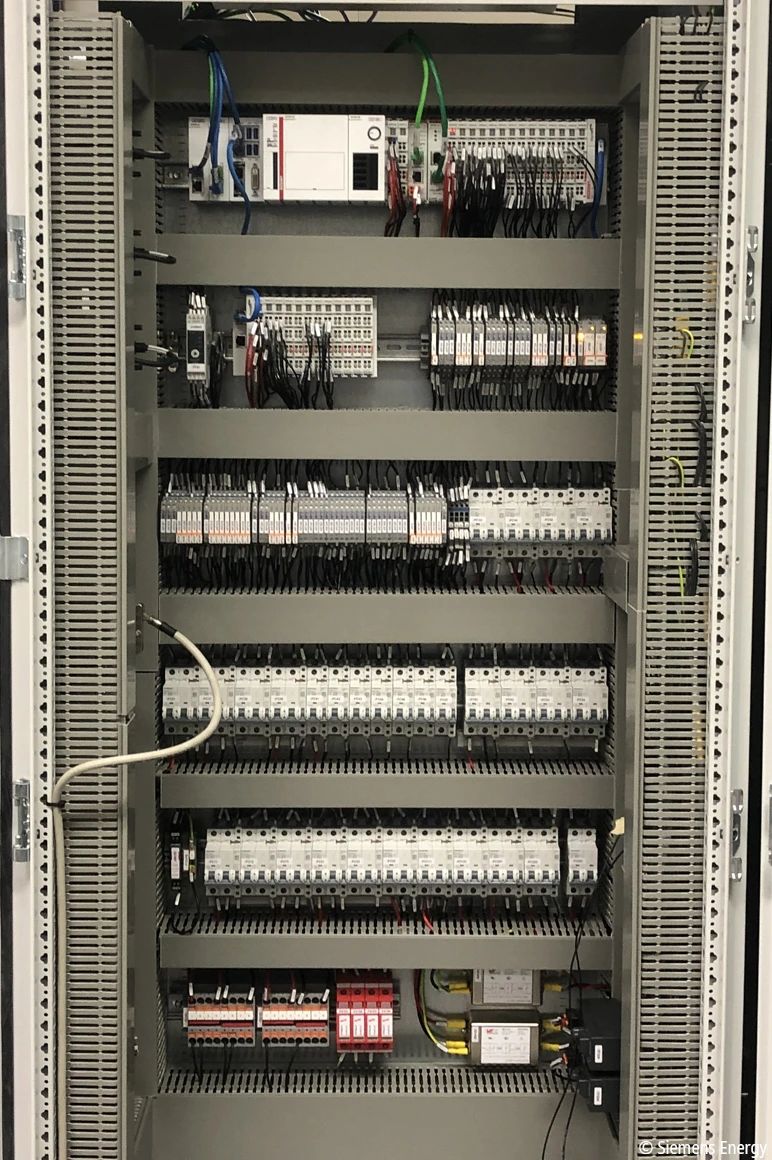
測試柜內(nèi)安裝了 CX2043 嵌入式控制器以及直接插接的 EtherCAT 端子模塊
集成��、開放的軟件
由于這類高壓直流輸電系統(tǒng)無法作為物理系統(tǒng)進(jìn)行開發(fā)和驗(yàn)證�����,因此通過仿真進(jìn)行早期測試至關(guān)重要��。在過去���,這些測試需要在多個不同的仿真環(huán)境中進(jìn)行��,通常要求將控制和保護(hù)軟件手動轉(zhuǎn)換到每一個環(huán)境中�����。這種手動轉(zhuǎn)換過程不僅容易出錯且耗時,還難以實(shí)現(xiàn)所有環(huán)境中控制行為的一致性和可比性���。
西門子能源在追求一站式軟件解決方案的過程中��,多年來始終信賴 MATLAB® 和 Simulink® 平臺�,成功實(shí)踐了基于模型的設(shè)計和開發(fā)方法。在 Simulink® 中開發(fā)控制和保護(hù)軟件���,并結(jié)合使用 TwinCAT 3 Target for Simulink® 自動生成代碼��,能夠消除上述所有手動轉(zhuǎn)換步驟��,使得開發(fā)人員能夠?qū)W⒂谄浜诵娜蝿?wù)�。在不同的仿真環(huán)境中以及最終的控制硬件上運(yùn)行相同的軟件����,可以更有效地比較和驗(yàn)證系統(tǒng)行為。
另一個優(yōu)勢在于��,在系統(tǒng)出現(xiàn)錯誤或需要擴(kuò)展模型時���,這種解決方案能夠顯著時節(jié)省時間�����。過去���,開發(fā)人員需要進(jìn)入每個目標(biāo)系統(tǒng)修正錯誤或擴(kuò)展功能,但如今,這些工作都在 Simulink® 的源模型中完成�。結(jié)合 TwinCAT 使用,只需將已測試過的軟件模塊連接至物理接口��,就可以將其移植到高性能�����、高實(shí)時性的嵌入式控制器上����。因此,無論是 HIL(硬件在環(huán))測試�����,還是對真實(shí)系統(tǒng)中安裝的控制柜進(jìn)行測試���,該控制系統(tǒng)都能靈活應(yīng)對�,為電網(wǎng)中的各類應(yīng)用場景提供最為適配的控制系統(tǒng)��。
關(guān)于德國倍福
倍福(Beckhoff)是一家專注于自動化新技術(shù)的德資企業(yè)���,創(chuàng)立于 1980 年,總部位于德國威爾市。作為全球自動化技術(shù)的驅(qū)動者�,倍福定義了自動化領(lǐng)域的許多標(biāo)準(zhǔn),是國際標(biāo)準(zhǔn)的制定者和推動者�����。公司所生產(chǎn)的工業(yè) PC��、現(xiàn)場總線模塊��、驅(qū)動產(chǎn)品和 TwinCAT 自動化軟件構(gòu)成了一套完整的��、相互兼容的控制系統(tǒng)��,可為各個工控領(lǐng)域提供開放式自動化系統(tǒng)和完整的解決方案����。經(jīng)過 40 年的發(fā)展和努力,倍福已在世界各地設(shè)立 30 多家分支機(jī)構(gòu)�����,加上全球的合作伙伴���,業(yè)務(wù)遍及 70 多個國家和地區(qū)����。
倍福于 1997 年進(jìn)入中國市場,中國區(qū)總部落戶于上海市北高新產(chǎn)業(yè)園區(qū)��,現(xiàn)有員工 300 人��,辦事處遍及國內(nèi) 30 座大中城市����。創(chuàng)新產(chǎn)品和解決方案廣泛應(yīng)用于風(fēng)力發(fā)電、半導(dǎo)體���、光伏太陽能���、電子制造、金屬加工���、包裝機(jī)械�����、印刷機(jī)械�����、塑料加工����、輪胎加工�����、木材加工��、玻璃機(jī)械�、物流輸送以及樓宇自動化等眾多領(lǐng)域。
公司傾力推廣的 EtherCAT 實(shí)時工業(yè)以太網(wǎng)于 2014 年成為中國國家推薦性標(biāo)準(zhǔn)�����,并已入編工信部的《國家智能制造標(biāo)準(zhǔn)體系建設(shè)指南》��。作為一家技術(shù)驅(qū)動型公司���,倍福一直注重在技術(shù)上尋求突破創(chuàng)新���,在業(yè)內(nèi)享有“創(chuàng)新引擎”的美譽(yù)。倍?�;?PC 的控制技術(shù)具有良好的開放性,它支持所有主流的工業(yè)通信協(xié)議����,將 IT 技術(shù)、互聯(lián)網(wǎng)和自動化技術(shù)完美融合在一起����,為實(shí)現(xiàn)工業(yè) 4.0 和智能制造奠定了堅(jiān)實(shí)的技術(shù)基礎(chǔ)。
更多新聞?wù)垶g覽: https://www.beckhoff.com.cn