作為基于 PC 的控制技術(shù)專家�,倍福將其成熟且非常成功的 TwinCAT 產(chǎn)品系列整合到 TwinCAT Vision 集成式圖像處理解決方案中。這款新軟件的面世也很好地說明了圖像處理的重要性越來越高�����,它已經(jīng)成為提高制造機(jī)械質(zhì)量的關(guān)鍵因素���,特別是在工業(yè) 4.0��、質(zhì)量優(yōu)化及跟蹤與追蹤等應(yīng)用中�����。TwinCAT Vision 軟件將所有視覺硬件整合于一體���,構(gòu)成面向工業(yè)圖像處理的整體解決方案���。
基于 PC 的控制為這些應(yīng)用提供了一個(gè)理想的解決方案:TwinCAT Vision 將圖像處理功能添加到整合了 PLC、運(yùn)動控制�、機(jī)器人、高端測量技術(shù)�、物聯(lián)網(wǎng)及 HMI 的通用控制平臺中。這樣可以顯著簡化開發(fā)工作�����,因?yàn)橄鄼C(jī)配置和編程任務(wù)能夠在熟悉的 PLC 環(huán)境中實(shí)施�。另外,與圖像處理相關(guān)的所有控制功能都可以在 Runtime 系統(tǒng)中精確實(shí)時(shí)同步���,從而消除了延遲�,實(shí)時(shí)執(zhí)行圖像處理算法���,與傳統(tǒng)機(jī)器視覺解決方案相比有了質(zhì)的飛躍�。設(shè)備制造商可以借助 TwinCAT Vision 將圖像處理任務(wù)完全集成到中央控制系統(tǒng)中�,為更先進(jìn)的機(jī)器設(shè)計(jì)鋪平道路,從而能夠滿足未來的市場需求�����,提高市場競爭力和投資安全性。
TwinCAT Vision 的優(yōu)勢
競爭優(yōu)勢:將圖像處理功能整合到總的控制系統(tǒng)中可以提高設(shè)備效率�。機(jī)器視覺功能可以實(shí)現(xiàn)卓越的實(shí)時(shí)應(yīng)用性能。
輕松實(shí)現(xiàn)工業(yè) 4.0 解決方案:將 PLC�、運(yùn)動控制、測量技術(shù)和機(jī)器視覺功能與物聯(lián)網(wǎng)以及分析功能集成在同一個(gè)平臺上�,能夠更輕松地實(shí)現(xiàn)工業(yè) 4.0 應(yīng)用。
提高生產(chǎn)效率:高精度測量和精確的光學(xué)檢測確保符合工藝參數(shù)���。
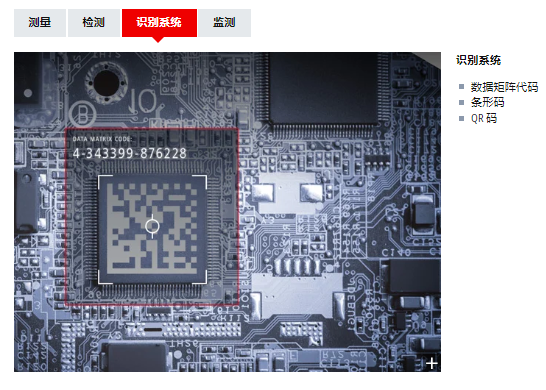
品質(zhì)保證:諸如跟蹤與追蹤等應(yīng)用支持全面的產(chǎn)品質(zhì)量追溯。
開放性:TwinCAT Vision 遵循的是倍福開放式控制技術(shù)理念��。
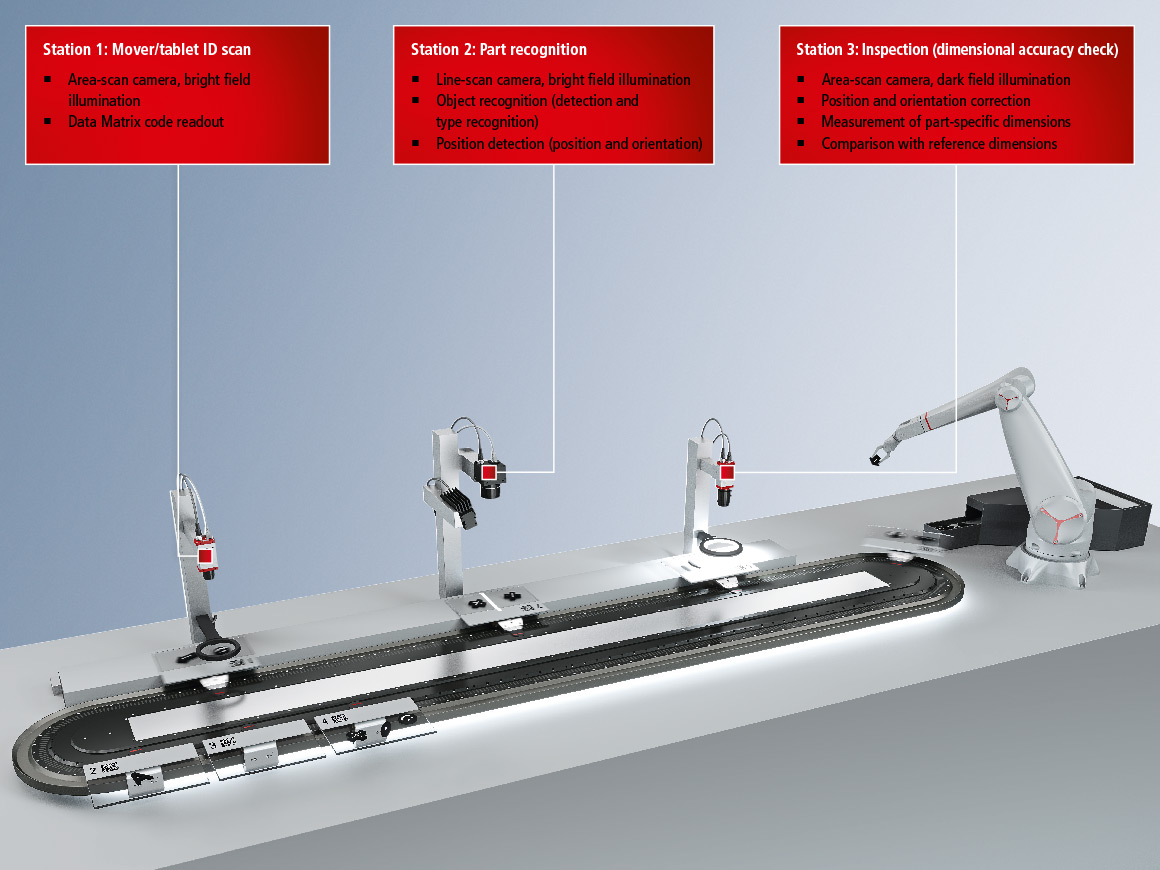
獨(dú)立于硬件:TwinCAT Vision 支持帶 GigE Vision 接口的線陣掃描和面陣掃描相機(jī)�。
軟件擴(kuò)展:允許用戶訪問原始相機(jī)數(shù)據(jù),并輕松合并自己的圖像處理算法��。
云連接:TwinCAT Vision 集成在 TwinCAT 控制平臺中��,它可與 TwinCAT IoT 和 TwinCAT Analytics 直接連接���。這樣可確保與云服務(wù)器輕松通信�,能夠訪問基于云的服務(wù)���,并簡化工業(yè) 4.0 應(yīng)用�。
實(shí)時(shí)應(yīng)用:將 PLC、運(yùn)動控制�、機(jī)器人、高端測量技術(shù)和機(jī)器視覺集成在同一個(gè)平臺上可以實(shí)現(xiàn)卓越的實(shí)時(shí)應(yīng)用性能���,顯著提高設(shè)備效率�����,同時(shí)避免運(yùn)動控制和機(jī)器人控制中不必要的延遲�����。
TwinCAT Vision 應(yīng)用



模塊化設(shè)計(jì):從開發(fā)環(huán)境到 Runtime
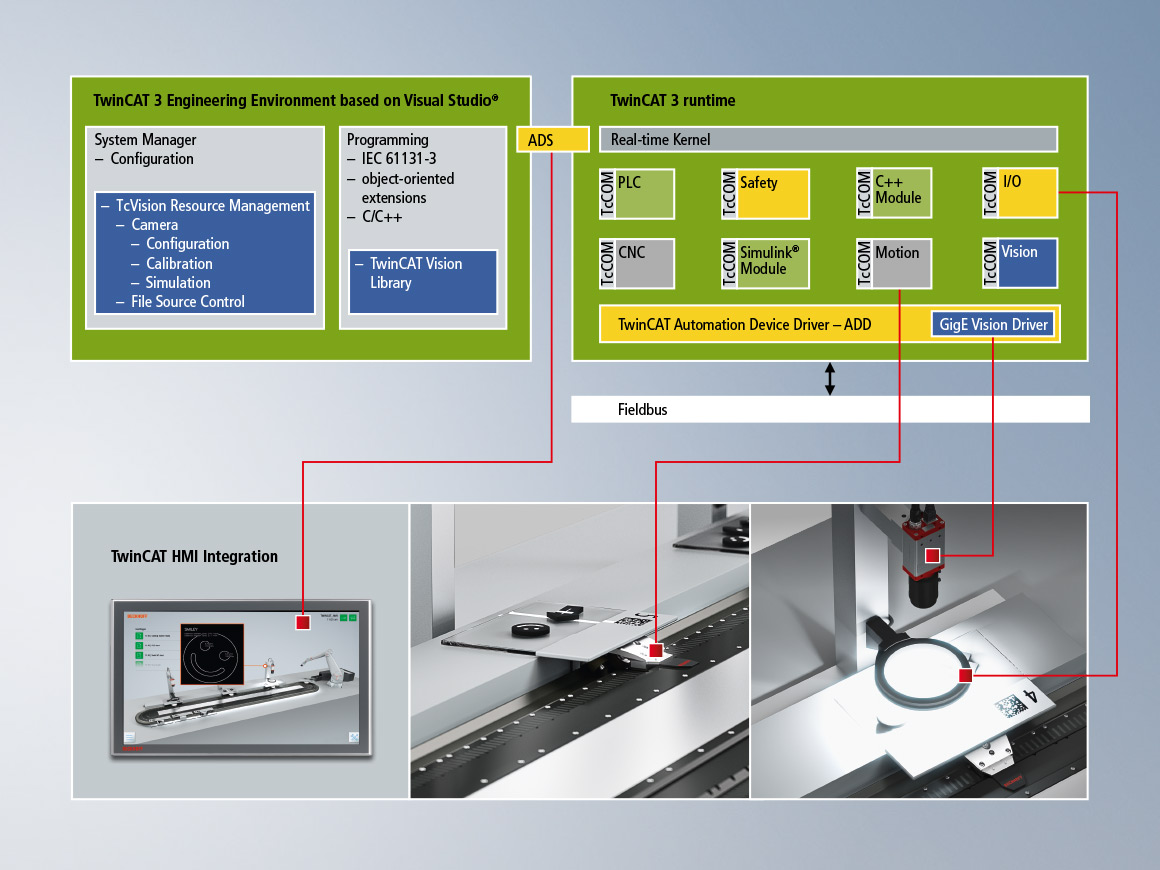
TwinCAT Vision 被直接集成到 TwinCAT 開發(fā)環(huán)境中���。可以在新的 Vision 節(jié)點(diǎn)下輕松添加或配置相機(jī)���,并在該節(jié)點(diǎn)下進(jìn)行校準(zhǔn)�。它也能夠捕捉相機(jī)圖片流以及輸入錄制���,而不是直接捕捉相機(jī)實(shí)時(shí)圖像����。或者����,也可以加載各種格式的圖像。這意味著���,即使沒有訪問相機(jī)��,用戶仍然可以開發(fā)和實(shí)施圖像處理程序�。圖像處理順序采用 PLC 編程語言以及使用所提供的各種圖像處理算法庫直接在 PLC 中編程���。將圖像處理功能集成到 PLC 中表示分析鏈在 TwinCAT Runtime 系統(tǒng)中執(zhí)行,從而能夠與在 PLC 上運(yùn)行的其它進(jìn)程(如運(yùn)動控制)進(jìn)行通信�����,不會出現(xiàn)延遲�。此外,它還提供 PLC 編程中常用到的所有調(diào)試選項(xiàng)��。中間結(jié)果可以隨時(shí)在開發(fā)環(huán)境或 TwinCAT HMI 中顯示���。
簡化開發(fā)工作���,提高 Runtime 性能:
輕松配置相機(jī)
開發(fā)采用 PLC 編程語言實(shí)現(xiàn)
分析鏈完全包含在 PLC 中
處理無延時(shí)
在熟悉的環(huán)境中輕松配置機(jī)器視覺
除了運(yùn)動控制和 I/O 配置之外����,TwinCAT Vision 還可以在 TwinCAT 開發(fā)環(huán)境中配置相機(jī)��。GigE Vision 相機(jī)可以集成在新的 TwinCAT Vision 節(jié)點(diǎn)下面�,根據(jù) GenICam 標(biāo)準(zhǔn)進(jìn)行配置。所有相機(jī)設(shè)置都可以在這里定義�,并可以在相機(jī)實(shí)時(shí)圖像中直接查看結(jié)果。此外���,也可以在開發(fā)環(huán)境中校準(zhǔn)相機(jī)�。用戶可以從一系列校準(zhǔn)模式中進(jìn)行選擇�,包括他們自己的用戶特定模式。而且��,他們可以直接查看結(jié)果��。TwinCAT Vision 與 TwinCAT 和 Visual Studio® 完全集成����。支持如窗口停靠和源代碼管理系統(tǒng)等所有人們所熟知的功能。
一個(gè)工具即可實(shí)現(xiàn)配置和編程:
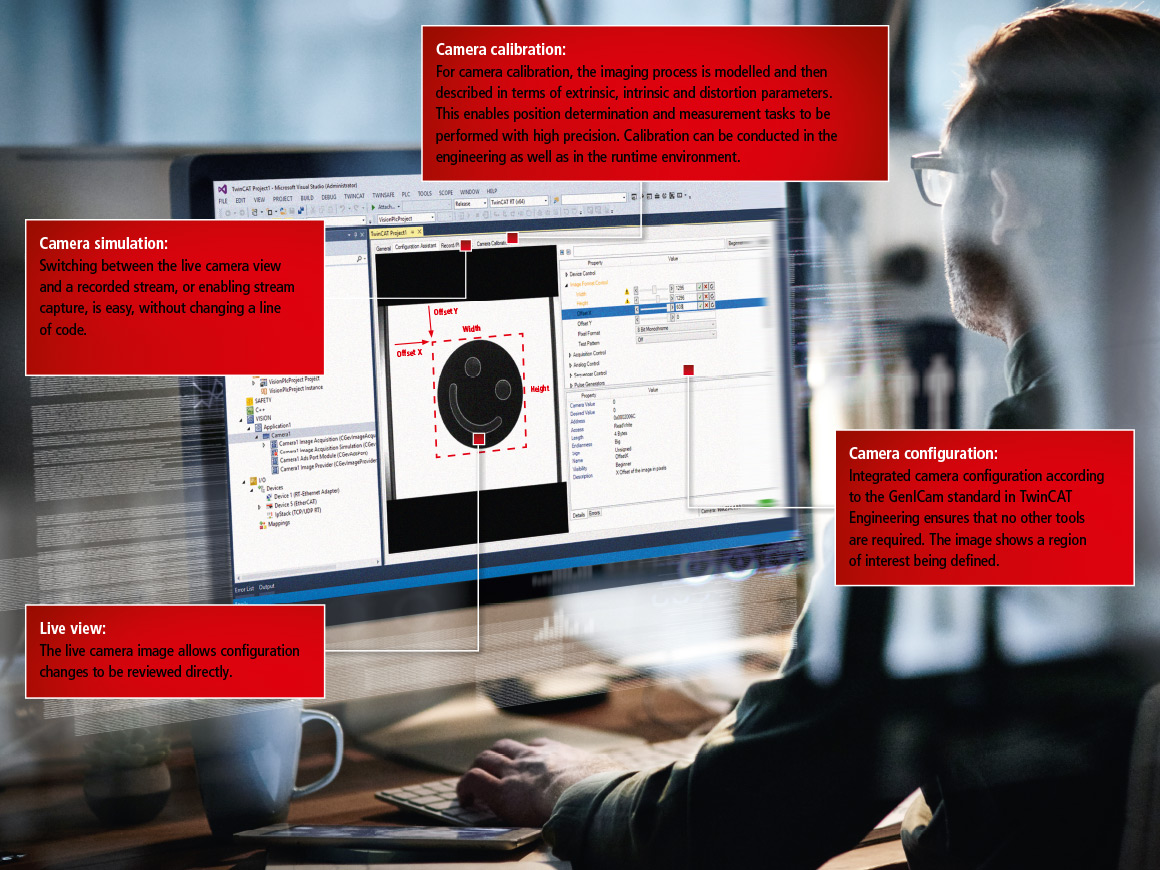
在開發(fā)環(huán)境和 Runtime 中校準(zhǔn)相機(jī):對于相機(jī)校準(zhǔn)����,先對成像過程進(jìn)行建模,然后根據(jù)外部�、內(nèi)部和失真參數(shù)進(jìn)行描述。這樣能夠高精度地完成定位和測量任務(wù)��。校準(zhǔn)可以在開發(fā)環(huán)境以及 Runtime 環(huán)境中進(jìn)行�。
集成相機(jī)配置功能:相機(jī)配置根據(jù) TwinCAT 開發(fā)環(huán)境中的 GenICam 標(biāo)準(zhǔn)進(jìn)行集成,因此無需使用其它工具���。圖像顯示正在定義的感興趣區(qū)域�。
實(shí)時(shí)顯示:相機(jī)實(shí)時(shí)圖像允許更改配置��,以便直接查看��。
相機(jī)仿真:可以輕松在現(xiàn)場相機(jī)查看和錄制的圖像流之間切換���,或者啟用圖像流捕捉,無需修改一行的代碼���。
視覺與控制功能:所有功能都已針對同一平臺進(jìn)行編程
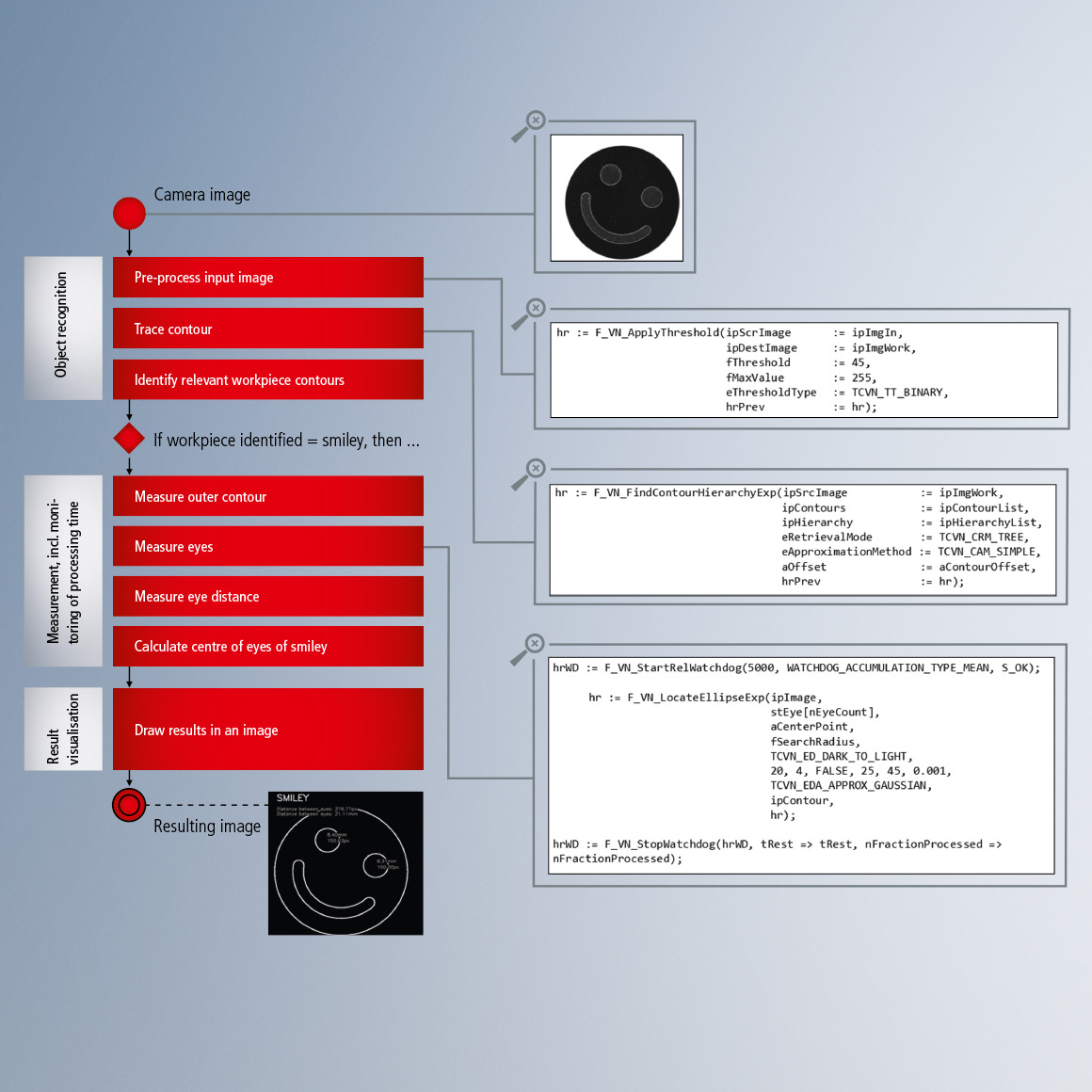
圖像分析在 PLC 中編程��。包括輪廓檢測��、輪廓識別��、關(guān)鍵點(diǎn)特征提取以及測量功能在內(nèi)的種類豐富的功能塊和功能庫可供使用����。諸如插入行或文本等附加信息可以插入到 PLC 內(nèi)的圖像中。分析鏈上任何一點(diǎn)的中間狀態(tài)都可以在開發(fā)環(huán)境或 TwinCAT HMI 中作為一個(gè)圖像查看���。用戶還可以使用 PLC 支持的常用調(diào)試選項(xiàng)(例如��,監(jiān)視變量和設(shè)置斷點(diǎn))�,并且可以在線修改圖像處理算法中的代碼��。
整合所有功能:
對象檢測
測量��,包括監(jiān)測處理時(shí)間
結(jié)果顯示
所有應(yīng)用程序?qū)崟r(shí)同步:運(yùn)動控制���、機(jī)器人和機(jī)器視覺
由于圖像處理算法在與 PLC����、運(yùn)動控制和機(jī)器人所處的相同環(huán)境中執(zhí)行�����,所有任務(wù)都可以輕松同步。圖像捕捉時(shí)序是精確定義的(例如使用觸發(fā)器)�����,能夠在給定的時(shí)間點(diǎn)上與軸或機(jī)器人位置進(jìn)行協(xié)調(diào)�。將圖像處理集成到 TwinCAT 中也簡化了開發(fā)過程。使用同一個(gè)工具即可輕松配置和編程所有任務(wù)���。集成還使得設(shè)備制造商能夠保留自己的圖像處理專業(yè)知識����。由于所有的圖像處理算法都是在同一個(gè) Runtime 間內(nèi)以同步方式執(zhí)行��,因此可以完全消除通信中可能出現(xiàn)的延遲。整體上說�����,這些增強(qiáng)功能可以實(shí)現(xiàn)實(shí)質(zhì)性的過程優(yōu)化���。